[J6] 2024
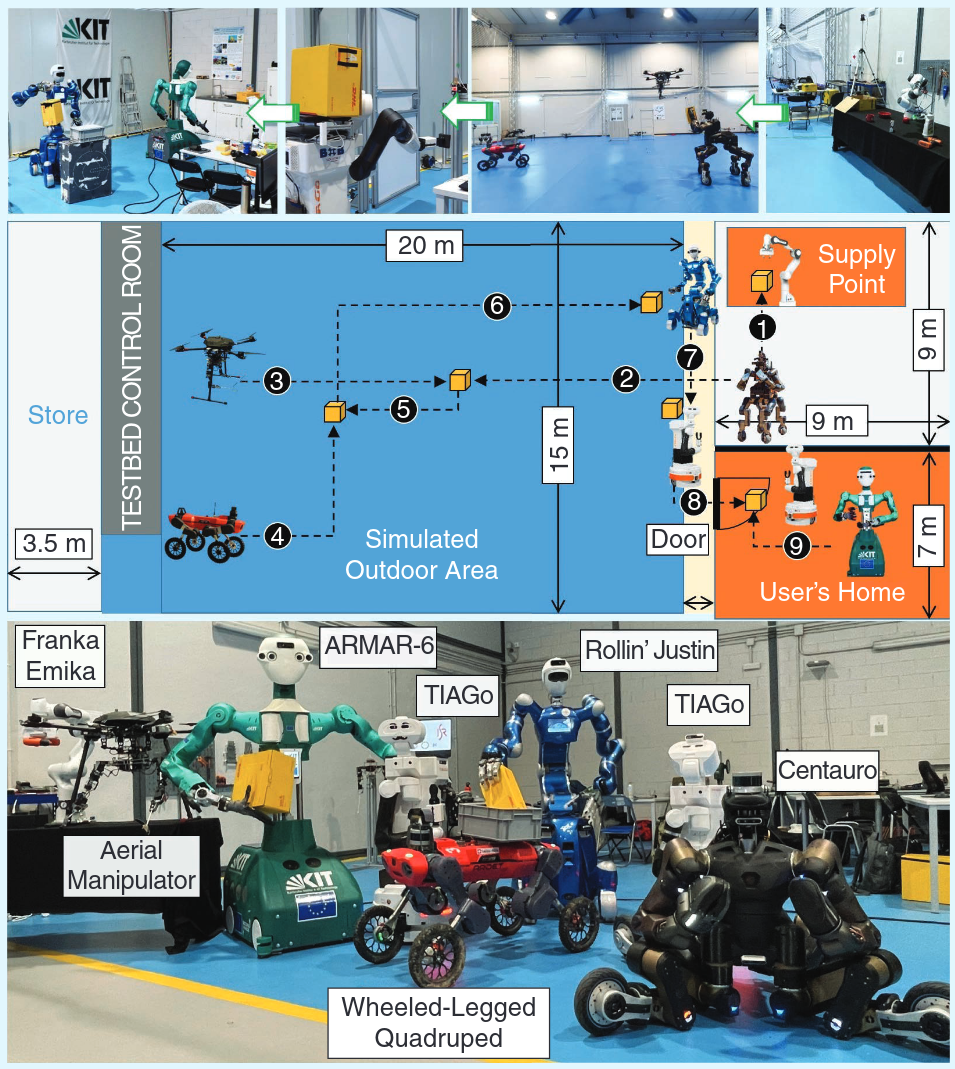
Door-to-Door Parcel Delivery From Supply Point to User’s Home With Heterogeneous Robot Team: The euROBIN First-Year Robotics Hackathon
Alejandro Suarez, Rainer Kartmann, Daniel Leidner, Luca Rossini, Johann Huber, Carlos Azevedo, Quentin Rouxel, Marko Bjelonic, Antonio Gonzalez-Morgado, Christian Dreher, Peter Schmaus, Arturo Laurenzi, François Hélénon, Rodrigo Serra, Jean-Baptiste Mouret, Lorenz Wellhausen, Vicente Perez-Sanchez, Jianfeng Gao, Adrian Simon Bauer, Alessio De Luca, Mouad Abrini, Rui Bettencourt, Olivier Rochel, Joonho Lee, Pablo Viana, Christoph Pohl, Nesrine Batti, Diego Vedelago, Vamsi Krishna Guda, Alexander Reske, Carlos Alvarez, Fabian Reister, Werner Friedl, Corrado Burchielli, Aline Baudry, Fabian Peller-Konrad, Thomas Gumpert, Luca Muratore, Philippe Gauthier, Franziska Krebs, Sebastian Jung, Lorenzo Baccelliere, Hippolyte Watrelot, Andre Meixner, Anne Köpken, Mohamed Chetouani, Pascal Weiner, Florian Lay, Felix Hundhausen, Anne Reichert, Noémie Jaquier, Florian Schmidt, Marco Sewtz, Freek Stulp, Lioba Suchenwirth, Rudolph Triebel, Xuwei Wu, Begoña Arrue, Rebecca Schedl-Warpup, Marco Hutter, Serena Ivaldi, Pedro U Lima, Stéphane Doncieux, Nikos Tsagarakis, Tamim Asfour, Anibal Ollero, Alin Albu-Schäffer
IEEE Robotics & Automation Magazine (RAM), 2024